The whole scene is tracked by a camera in order to provide a localization for the robots and the ball. We use visual codes named ArUco as fiducial markers to detect the corner of the fields and the robots.
The ball is detected using its color (orange).
Markers PDFs
- Full field (PDF)
- Field markers:
- Green team markers (PDF)
- Blue team markers (PDF)
Field dimensions
Here are the main field dimensions:
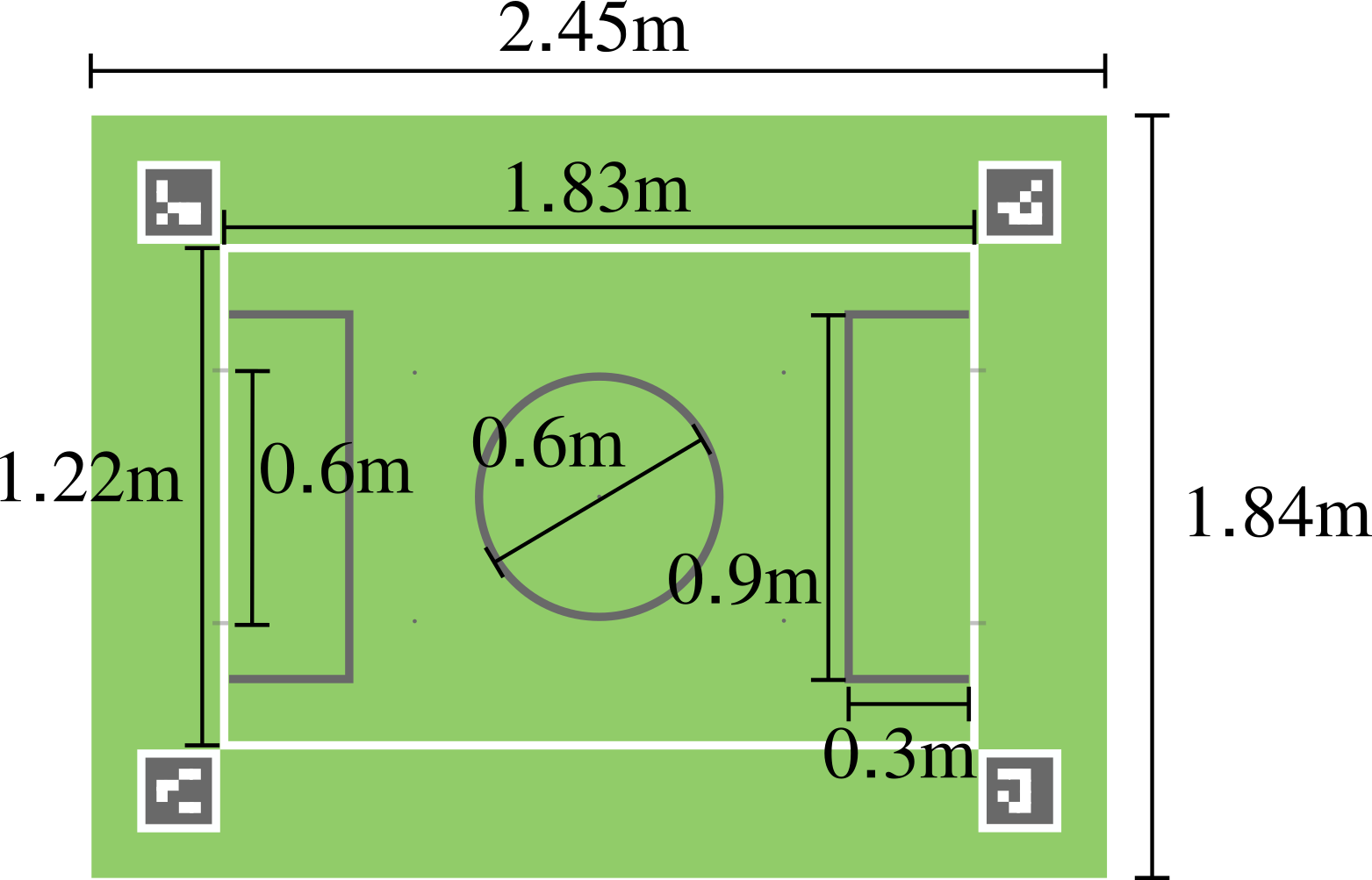
If you want to deploy the kit, we recommend a floor footprint of about 2.5m x 2.5m. Indeed, you need some extra space around the field to deploy the structure for hold the camera.
Coordinates system
The field coordinates used in the software are the following:

- The frame’s origin is the middle of the field, and robots orientation are angle formed by field x axis and front of the robot.
- We use international system units, distances are then expressed in meters and orientations in radians.
(x=0.4 m, y=0.4 m, alpha=pi/4 rad).
Robots
You can print green and blue markers and place them on the robots:
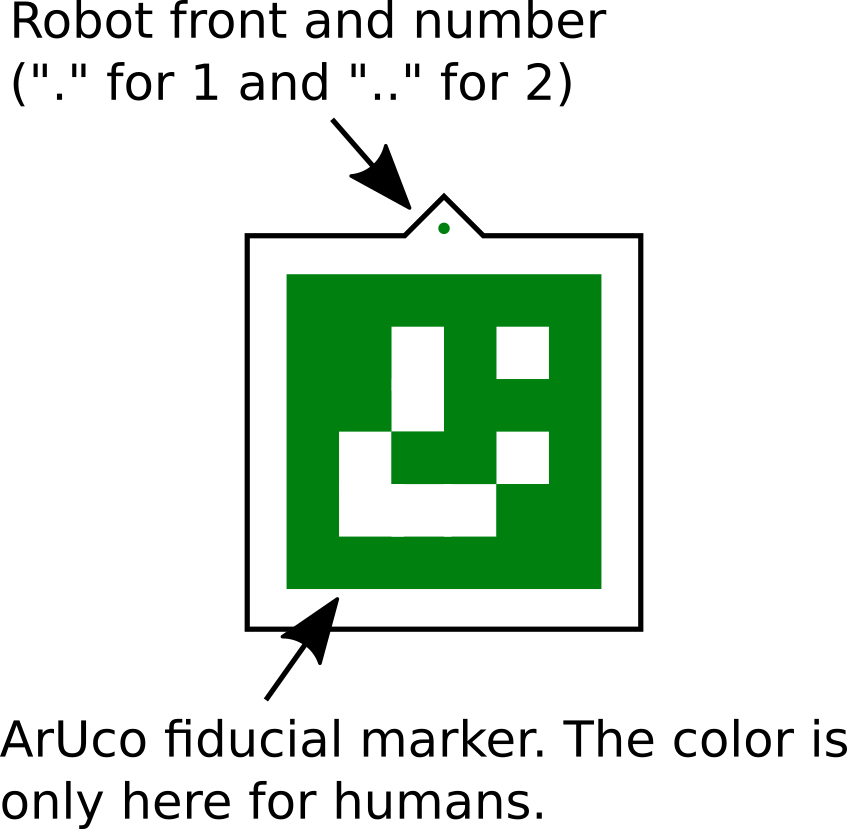
Markers
Markers are ArUco 4x4, you can use tool like this one, printed with a scale of of 8 cm for the robots and 16cm for field corners. The PDF provided previously are 1:1 scale. The ArUco ids are:
0: field corner 11: field corner 22: field corner 33: field corner 44: robot green 15: robot green 26: robot blue 17: robot blue 28-15: generic objects
 Robot Soccer Kit
Robot Soccer Kit
