The goal of this project is to provide an open-source material to build and operate a setup featuring
omniwheel robots and a soccer field monitored with a camera.
With this setup, it is possible for two teams to code a program and play against each other. Inspired by leagues from RoboCup, the setup can be used for pedagogical purpose, but also to organize competitions.
With this setup, it is possible for two teams to code a program and play against each other. Inspired by leagues from RoboCup, the setup can be used for pedagogical purpose, but also to organize competitions.
Join Discord
Installation Instructions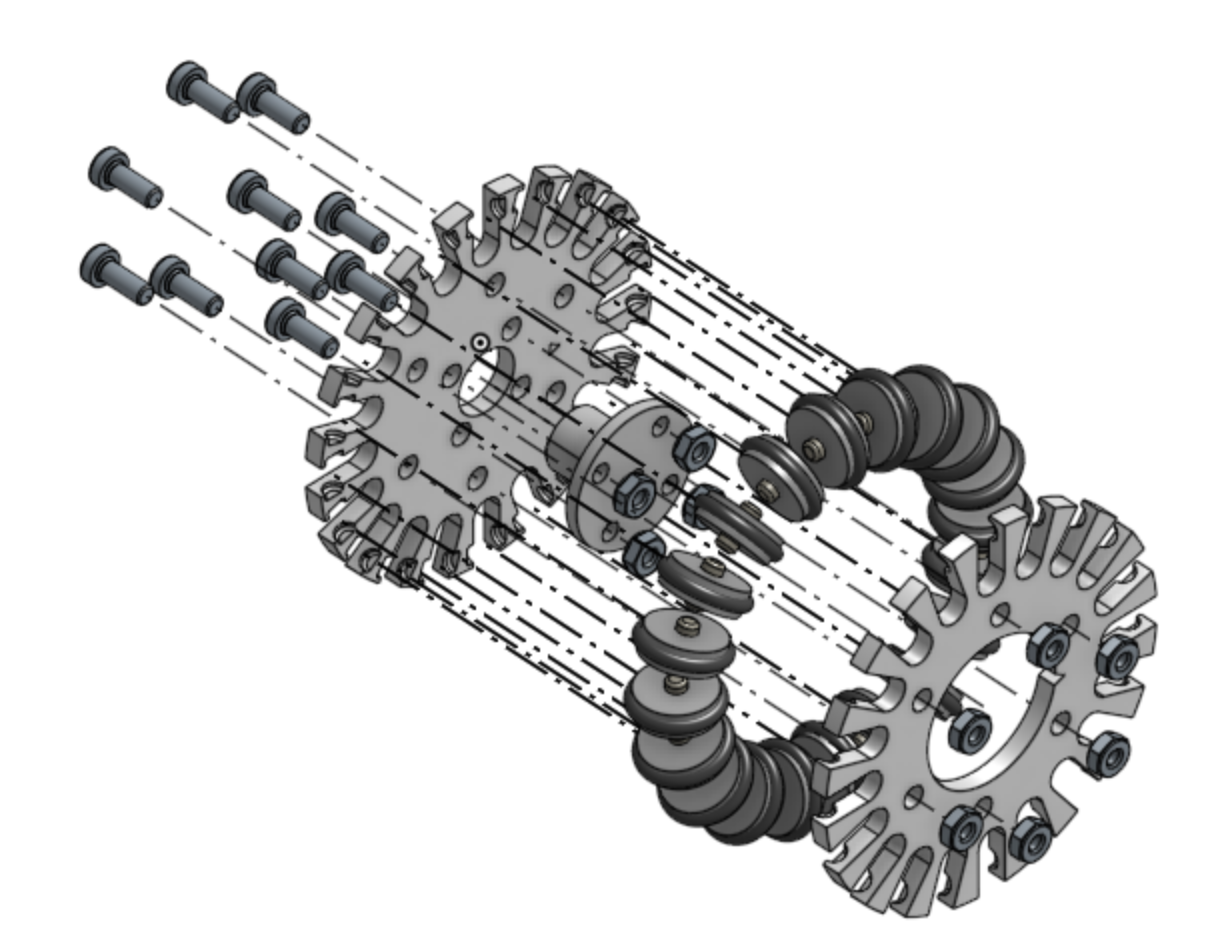
Open-source low-cost hardware
The kit features robots including three omnidirectional wheels, a solenoid kicker and Bluetooth communication. All parts, 3D models and electronics are documented here and can be built from scratch.
Robots hardware » Setup hardware » Assembly Instructions »
The kit features robots including three omnidirectional wheels, a solenoid kicker and Bluetooth communication. All parts, 3D models and electronics are documented here and can be built from scratch.
Robots hardware » Setup hardware » Assembly Instructions »
External vision-based tracking system
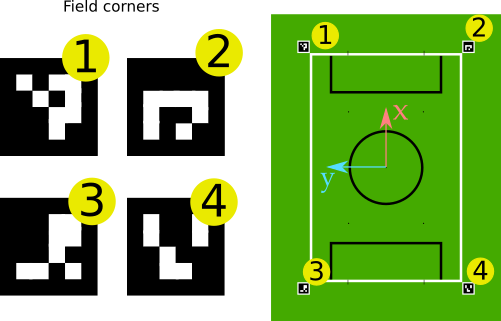
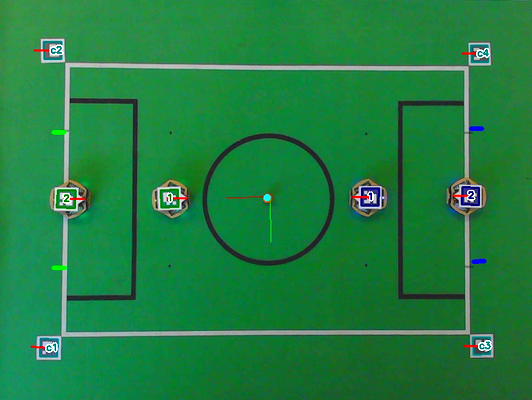
Robot Soccer Kit uses marker tags to detect the field and robots position in an unified coordinates system.
Access Tracking System documentation »
Robot Soccer Kit uses marker tags to detect the field and robots position in an unified coordinates system.
Access Tracking System documentation »
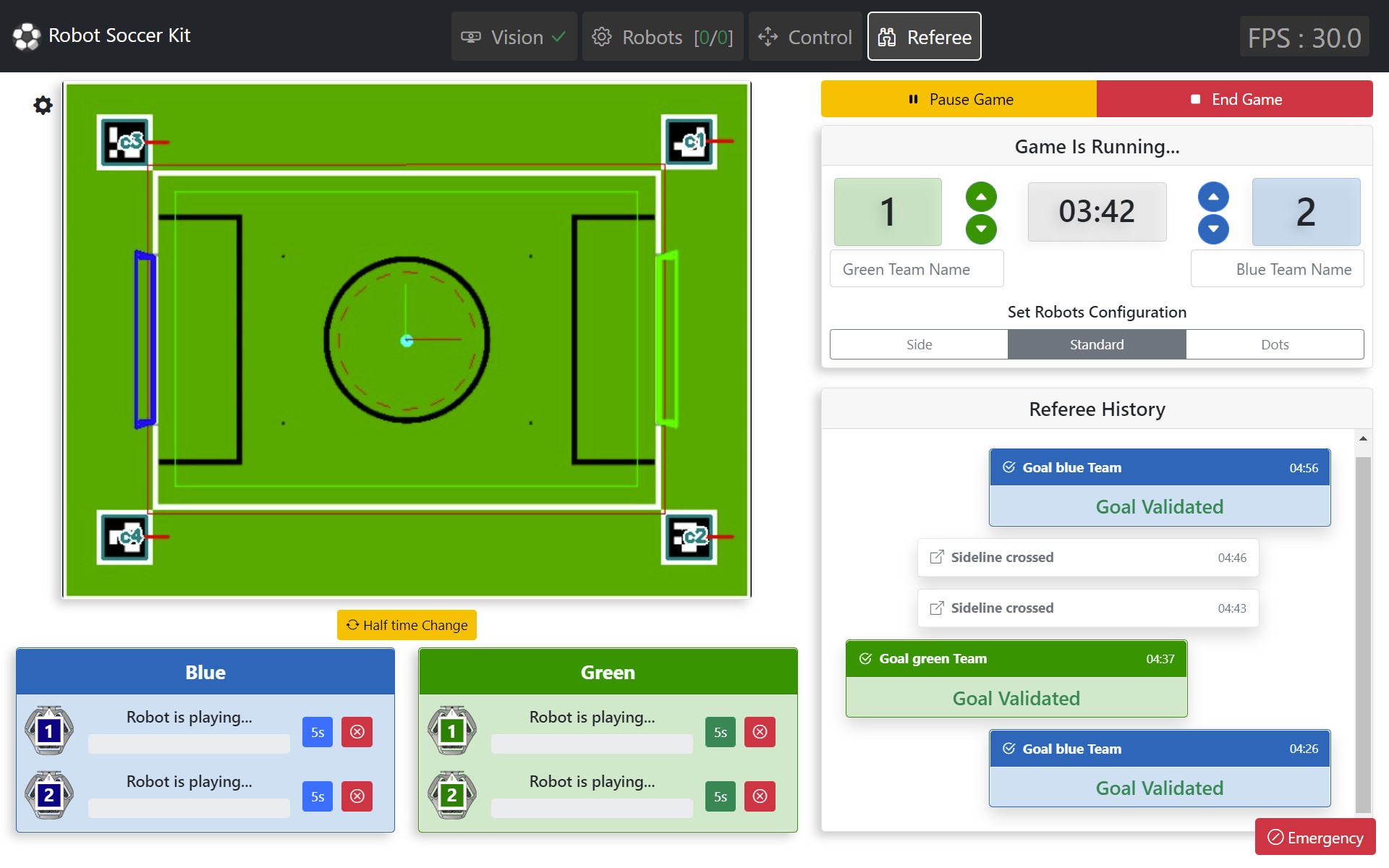
Game controller
The game controller is a graphical tool allowing you to calibrate the cameras for the detection and the Bluetooth communication with the robots
Access Game Controller documentation »
The game controller is a graphical tool allowing you to calibrate the cameras for the detection and the Bluetooth communication with the robots
Access Game Controller documentation »

Python API
All parts, 3D models and electronics are documented here and can be built from scratch.
Access API documentation »
All parts, 3D models and electronics are documented here and can be built from scratch.
Access API documentation »
Referee
The Referee is graphical tool, part of the game controller, it allows the automatic arbitration of a game.
Access Referee documentation »
The Referee is graphical tool, part of the game controller, it allows the automatic arbitration of a game.
Access Referee documentation »
GitHub repository
https://github.com/robot-soccer-kit/robot-soccer-kitLicense

This work is licensed under a Creative Commons Attribution-NonCommercial 2.0 Generic License.
 Robot Soccer Kit
Robot Soccer Kit