



Structure
| Part | Reference | Comment |
|---|---|---|
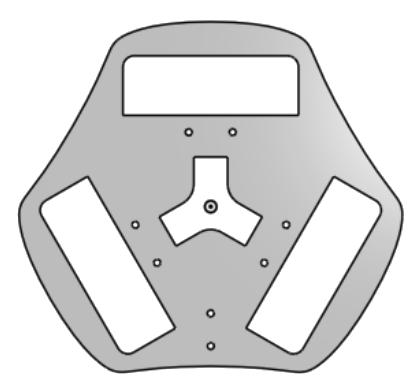 |
Robot frame | The robot frame can be cut in 3mm MDF or PMMA |
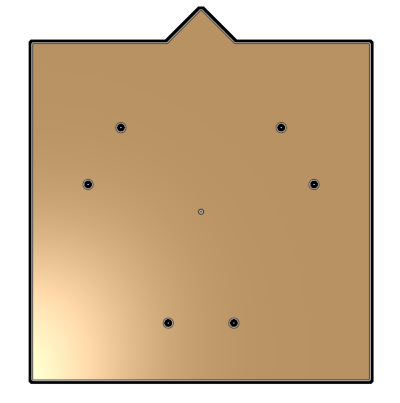 |
Marker |
The marker part can be cut in 3mm MDF or PMMA
Then, print the relevant robot markers and stick them on it. |
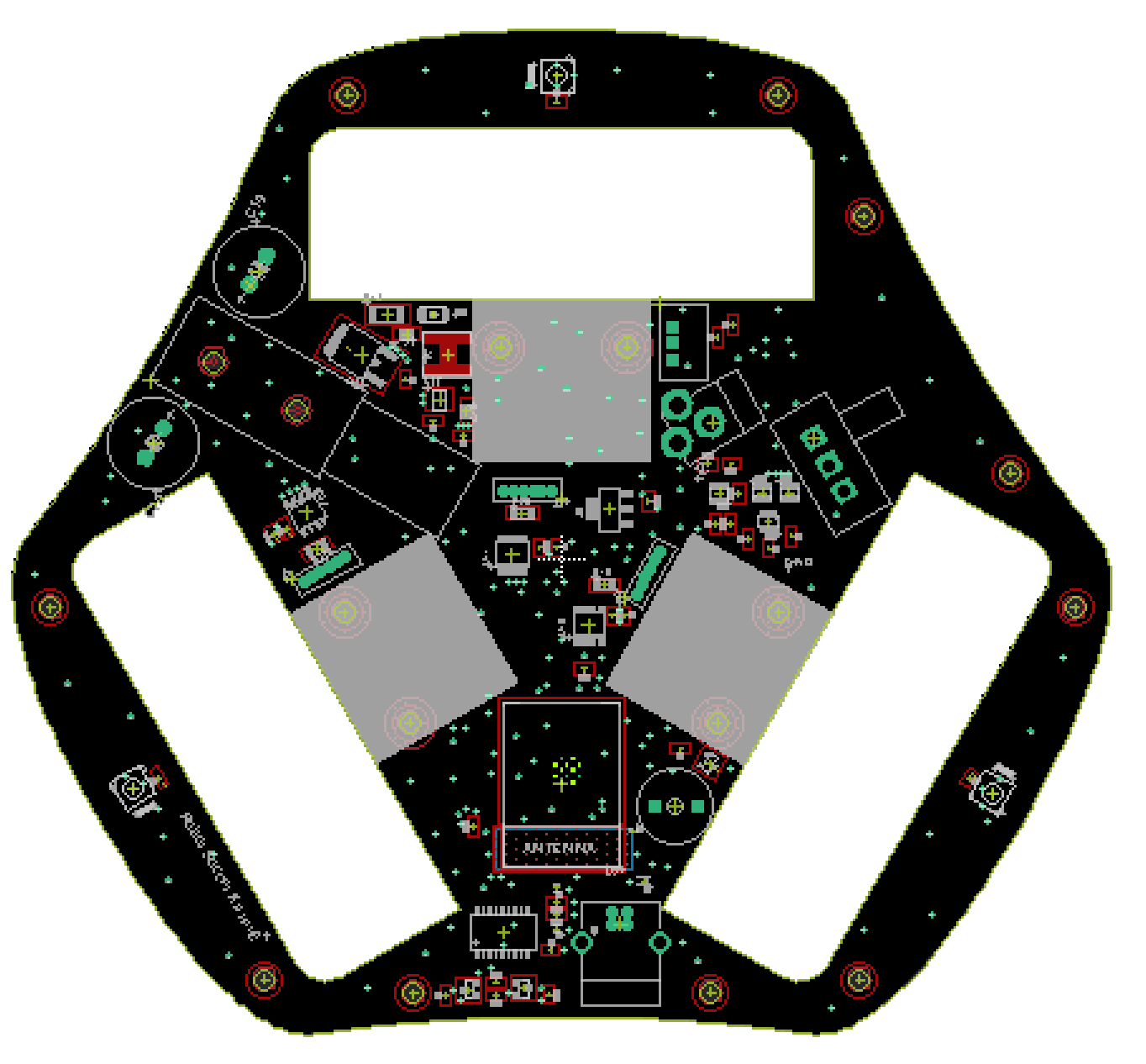 |
Mainboard |
Mainboard assembled PCB
Click here for more details on electronics |
 |
Structural screws |
|
Motors and wheels
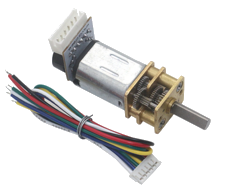 |
GA12-N20
rated 6V
|
3x motors
The current reduction trade-off offers a high torque and the speed of the robots are thus limited. This is however not an issue in adversarial game where precision counts more than velocity. |
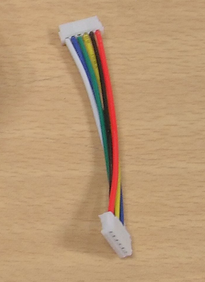 |
Motor cables | 3x JST-ZH cables (double ended, inversed), 6 pins, length: 5cm. Possible reference: A06ZR06ZR28H51A. |
 |
Motor couplers | Those couplers have internal diameter of 3mm, the small part of the ring is 10mm, the big part is ~22mm and the screw spacing is 16mm. |
 |
3D parts |
Option 1, use FDM 3D printer and print the following:
|
|
|
Wheel screws |
|
 |
V623ZZ | 60x Bearings for passive wheels |
 |
O-ring
8mm ID, 2mm thick
|
60x O-ring for passive wheels, those are optional (without them it works as well) |
Kicker
 |
JF-0530B
6V
|
A small plunger that can be sourced from many online. Used to kick the ball. |
 |
Kicker tip |
Can be cut using laser cutter out of MDF or PMMA:
|
|
|
Kicker screws |
|
Powering
 |
18650 VT6 | 2x 18650 batteries |
 |
2x18650 holder | Holder for 2x18650 batteries with jack 2.35mm output |
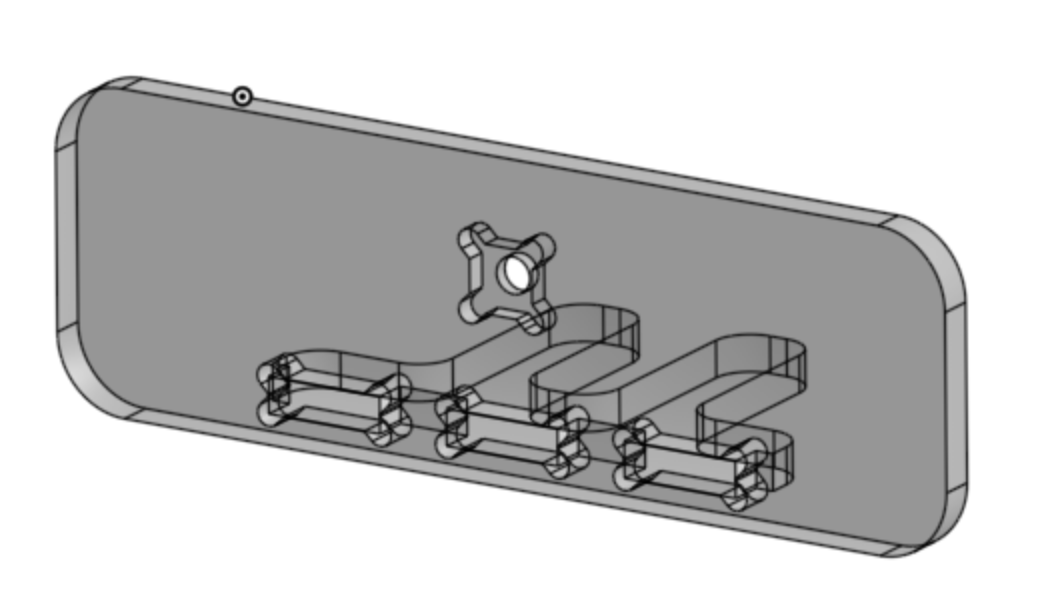
Quality of life
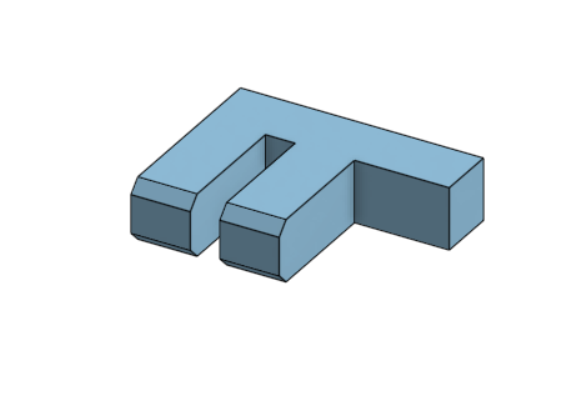 |
Batteries blocker |
This F-shaped blocked can be used to prevent the batteries from moving in the holder.
|
 Robot Soccer Kit
Robot Soccer Kit
